Is a Repaired Motor Less Reliable?
Richard Nailen
Is there is reason to suppose a properly repaired motor is less reliable than a new machine?
Reliability: “Capable of Being Relied On”
That’s the entire definition, in at least two dictionaries, of the word. Few definitions are less informative. Nevertheless, whereas the effect of repairs on motor efficiency was an important issue a few years ago, concern is now being expressed about how repairs affect reliability.
In 1982, Heinz Bloch, a well-known authority on machinery operation and maintenance, wrote a 680-page book titled Improving Machinery Reliability (now in its 3rd edition). The author mentions “reliability improvement,” “increased reliability,” “optimum reliability,” “high reliability,” “continued reliability,” and “maximum reliability.” Yet nowhere does he define the word reliability. As for electric motors, the book contains only a brief 15-page section devoted only to basic motor technology
To most people, reliability is a measure of the degree to which something works when called upon. If it doesn’t work half the time, we might consider it “only 50% reliable,” or we might say “chances are only 50-50 it will work at any given time.” Assigning such numbers to reliability involves statistical theory that’s not so simple. We need not go into the theory here. What we do need to examine more closely is the meaning of “it works” versus “it doesn’t work.”
Consider the automobile. One vehicle starts easily on cold winter mornings and always reaches its destination-yet it has a tendency to overheat, it leaks oil on the garage floor, and there’s always been that mysterious rattle. Is it more, or less, reliable than the car displaying no audible or visible defects, but that needs an annual brake overhaul, has a front end that won’t stay aligned, and gets terrible gas mileage?
Quantifying Reliability
As for electric motors-one may be noisier than another, or may exhibit out-of-tolerance vibration. How is “reliability” to be quantified?
Few technical definitions exist. Generally, though, the lower the failure rate-the fewer failures of units over a given time period-the higher the unit reliability.
But what is “failure”? The Edison Electric Institute definition is: “Lack of one or more fundamental functions which necessitates immediate removal from service.” (See Figure 1.) In a survey of 5,408 motors in electric utility service, back in 1984, the annual failure rate over a six-year period ranged from 0.9 to 2.6, depending upon the motor manufacturer. (Worth noting: rotor and bearing troubles predominated; we’ll say more about that later.)
Reliability is sometimes stated as a percentage, according to this formula:
in which N is the number of units in the population being considered and R is the number of “failures” in that set during the period studied. That concept is difficult to apply to machines that may take a long time to repair a single failure, when the period being examined is fairly short. The lengthy downtime results in an actual reliability no greater than that of another machine that fails more than once but is repaired quickly.
A 1990 IEEE paper (“Reliability Improvement and Economic Benefits of On-Line Monitoring Systems for Large Induction Machines” by Siyambalapiliya and McLaren) presumes a motor failure rate of 3% to 10%, defined as the number of failures in a specific unit divided by a specific time span. If a rate of 5% per year is taken as an example, the mathematics of probability leads to the conclusion that there is a 4.75% chance of one unit failing in any one year. Presumably that would describe a unit reliability of 95.25%.
Just what is failure?
But again, “failure” needs some definition. Papers on the subject often refer only to “catastrophic” failure-which is not much help in defining what can happen to a motor.
Many engineers have studied this issue over the past 30 years. Numerous technical papers discuss their findings. Much of that material, however, deals only with “large” motors (above 500 horsepower, in present-day NEMA standard terms). The most recent data appear in the IEEE Transactions on Industry Applications, Volumes IA-21 (1985) and IA-23 (1987), under the title “Report of Large Motor Reliability Survey of Industrial and Commercial Installations.” Previous surveys, including other apparatus as well as motors, and only in industrial plants, appeared in Volume IA-IO (1974); still earlier results were published in 1962.
Such surveys have generally taken no account of age, condition, or service history of individual units, nor was any allowance made for variation in application or operating conditions (such as annual hours of use, or relative severity of starting duly).
Thousands of motors might ordinarily be considered an impressive survey sample size. For polyphase a-c machines, however, the variation in origin, rating, enclosure, and application is so broad that such a cross-section hardly scratches the surface.
The research should not be dismissed as wholly irrelevant, of course. Information of this kind is difficult to get because, despite widespread emphasis on predictive maintenance, “trending” of diagnostic data, and life-cycle cost analysis, few industrial users keep sufficiently detailed records to support research much beyond what the published surveys have accomplished.
Reliability Information Unreliable
Nevertheless, the concern about motor efficiency-leading to utility rebate programs, to the EPACT legislation, to studies of motor repair practices, and now to the development of NEMA’s “Premium Efficiency” products-have highlighted two deficiencies in available reliability information.
The first has been lack of a definitive answer to this question: ‘Are more-efficient motors inherently more reliable?” Prior to the 1997 effective date of EPACT, promoters of higher-efficiency designs (including the U.S. Department of Energy) often had difficulty justifying the added investment in efficiency based on energy cost savings alone. Some marketers implied (or claimed) higher reliability and longer life for more efficient designs as an added benefit.
Various reasons were given. The most common one was a presumed reduction in motor operating temperature, said to lengthen the life of both windings and bearings. However, such reasoning was largely fallacious, because:
* Motors seldom fail because of winding overheating not involving abuse such as blocked ventilation (Figure 2). Some authorities estimate that 75% to 90% of all motor breakdowns involve the rotor or originate with bearings.
* Furthermore, differences in ventilation systems (especially smaller cooling fans to reduce windage loss) often cause a motor with reduced losses to run at the same temperature as the earlier, less efficient design. Temperature limits themselves (either on the motor rating or on the insulation system) have not changed for decades.
* Bearing operating temperature limits for all standard motors are far below any danger point. The higher the actual bearing temperature, the sooner relubrication will be needed-a condition imposed by grease characteristics, not by the bearing itself.
Eventually, one manufacturer was able to publish comparative data on “standard” (pre-EPACT) versus “energy efficient” motor reliability (meaning failure rate). Warranty claims were the basis. They showed no significant difference between the two product lines. (See “Are energy efficient motors reliable?” in EA October 1998.)
Any such comparison can be questioned on several grounds, such as:
* What range of conditions was covered by the claims?
* Since warranty periods normally amount to only 12 to 36 months, while motor life spans are generally considered to be 5 to 10 times that long, the comparison involves only infant mortality (about which more later) and is not necessarily representative of long-term performance.
* Obviously, only one manufacturer’s products are included.
* The energy-efficient product was relatively new in the marketplace. The ratio of warranty failures to units in service could differ considerably for those motors compared to a much broader, more widely used product line.
That particular comparison became largely irrelevant after 1997. Once the “energy efficient” EPACT design became the new standard, the former standard was no longer a purchaser option. Whether or not it was either more or less reliable might be an ongoing cause of acrimony between user and manufacturer, but not a valid reason to choose a different design.
However, when NEMA established the “Premium” line, offering still higher efficiency, two alternatives (at differing prices) once again became available. Some of the same arguments surfaced again.
Although no definitive proof exists (or is likely to), the claim of enhanced reliability based on “cooler running” appears no more valid than before. That applies also to bearing differences (which are largely non-existent). In any event, the population of “Premium Efficiency” units now in service is too small to provide trustworthy data.
The issue of sample size is an important one, because of the nature of reliability, which continues to lack a consistent definition for rotating machines. On the other hand, its significance in electric power systems is well understood. The subject merits a lengthy IEEE standard all to itself: IEEE 493, the “Gold Book,” titled Recommended Practice for Design of Reliable Industrial and Commercial Power Systems.
Although the causes may be numerous, in many points of origin, a system failure is easily defined. It consists in the interruption of power flow sufficient to stop some operation not meant to be stopped. “Power failure”-a “lights out” condition-is not hard to define.
In contrast, “failure” of an electric motor may have many meanings, including:
* Inability to start.
* Tripping off-line during running because of some winding (or other) fault not immediately recognizable.
* Complete winding burnout.
* Damage within one or both bearings.
* A bent or broken shaft.
* A foreign object (such as a piece of hardware) appearing inside the motor.
* A broken fan blade, resulting in dangerously high vibration.
Define Failure by Symptoms?
If we choose to define “failure” as the EEI has (“necessitating immediate removal from service”), we have a problem. A motor that develops some internal noise, or that becomes so dirty that it begins to overheat, represents potential trouble-but is that “failure”? And look again at “inability to start.” When “energy efficient” motors were developed, more than one plant operator complained that “they won’t start the load,” whereas an older motor did. Both motors fully met NEMA standards, but the accelerating torque for the “energy efficient” design did not exceed standards by as much as the older design did. The driven load itself was not standard; it demanded more torque during starting, which was provided by the excess margin of the old design. The understandable user conclusion was that the higher-efficiency design was not “reliable.” But this cannot be termed “failure.” It’s a misapplication.
The foregoing list could go on much further. Clearly, because many such “failures” are not the motor’s fault, they are not properly attributable to the motor design or manufacture (again, see Figure 2). Any industry survey of unit reliability is unlikely to unearth enough detail to sort all that out. Plant records are probably going to show little beyond the fact that the motor needed repair.
When first introduced, the “energy efficient” motor commanded a higher price, and (as noted earlier) its reduced energy cost was often too little incentive for the added investment. That didn’t matter once such designs were the only product on the market.
Today’s “Premium Efficiency” motor is optional, however, as well as involving a premium price. Hence, taking reliability comparisons a step further, the question now being asked is this: Is a new, “Premium Efficiency” motor inherently more reliable than a repaired motor of either the pre-1997 or the EPACT type?
Intuitively, one might presume that any brand-new product should prove more reliable than one having seen service (whether repaired or not). The presumption is questionable, for many reasons. The first one is infant mortality. Figure 3 shows the “bathtub curve” (so-called because of its shape) applicable to any product. Two of its characteristics deserve attention. One is that early or “premature” failures (in Region A) tend to considerably outnumber those occurring after long service (Region B). Still later, of course, “wearout” takes over, and the failure rate inevitably rises again. No matter what quality level or design conservatism is achieved, this curve shape will always apply.
A 1990 U.S. Navy examination of “reliability-centered maintenance” concluded that: “These . . . studies showed the assumption that the reliability of equipment always decreased with age was incorrect. In fact, what was discovered was the opposite. . . .”
The second point to keep in mind is that this is a statistical probability variation. It can apply only to a large population of identical units operating under identical conditions. It says nothing about any individual unit, or several such units.
Consider ball bearings. Based on large-scale testing, and statistical analysis, each bearing design is subject to an “LJQ” life. When operated at rated load and speed, with proper lubrication, 90% of all such bearings will last as least as long as the “L^sub 10^” life in hours. (Some may last much longer, although no one can say which ones, or how much- sec Figure 4). But 10% of all such bearings may fail any time before the LJQ period. One or more could fail during the first revolution. Which 10% of any given group of bearings will exhibit such behavior? No one can say.
A similar concept might apply to motors except for these problems:
* A large enough group of identical units, under identical conditions, is not to be found in the real world.
* The possible failure modes (however we choose to define failure) are far more numerous than the simple metal fatigue that usually ends bearing life.
Meaning of Repair Open to Debate
Finally, of course, what do we mean by a repaired motor? all these questions are pertinent:
* Repaired to what extent? That stay in (he repair shop may have involved nothing more than a cleaning (Figure 5); the bearings might have been replaced (whether or not they needed it); rebalancing (Figure 6); a new shaft might have been installed to replace a broken one; or the stator may have been rewound.
* Repaired in what manner! Did the shop adhere to industry standards (ANSI AR-IOO), use materials in approved ways (such as a UL-1446 insulation system), and employ accepted quality management methods?
* Repaired how often? Is a motor that’s had a failed bearing replaced three times in IO years exhibiting more or less reliability than one in the shop only once, but needing a complete rewind?
Even more important than what work was needed, or how often, is the reason why work was needed. Far more motors are repaired because of abuse or misapplication than because of some inherent defect.
One may well interject at this point: “We’re comparing two motor designs here. Never mind what the real failure cause was; one of them held up under that condition, the other one didn’t. So what’s wrong with comparing?
The answer is: “Nothing, provided both motors-or, more especially, both large groups of motors-really do experience the same conditions.” They need to be on identical drives, subject to identical start/stop cycles, exposed to the same temperature, ventilated by the same air, and lubricated the same way.
That’s unlikely enough for any two new motors. When one of them has been “repaired,” here’s what can skew the comparison:
* The lower the horsepower rating, the less likely machines will be repaired at all following major damage (such as complete winding burnout). But for lesser repairs, a motor may be taken out of service several times throughout its useful lifetime. How “reliable” it is following the first such repair, or the fifth, cannot be estimated from any significant body of data throughout industry. Failure rate statistics to support reliability estimates for new “Premium Efficiency” motors are equally non-existent and will necessarily remain so for years to come.
* In many industrial settings, important motors are “spared.” When one goes out for servicing, a spare is put in its place. Once the repaired motor comes back, it goes into “spare” status, to remain out of service for months or years. Its operating life cannot be compared to that of a companion motor that didn’t need servicing.
* If in storage for a long lime, the motor may be exposed to hostile influences (such as high humidity, or building vibration) not experienced by “identical” units elsewhere. (See Figure 7.)
* The repaired motor may have been improved by the shop, perhaps to mitigate a problem thought to have caused failure, or perhaps because of the shop’s desire to do a better job based on experience. (See Figure 8.) Often, a conscientious service center, once familiar with a customer’s operating problems, will add or enhance motor construction during the repair process.
You’ll hear something like this: “Oh, yes, that motor needs [fill in your own experience], but they don’t do that at the factory. So we make sure it gets done during repairs here.” Extra winding taping or lacing, different impregnation, Class H insulation in place of Class B or F, added bearing seals-these render the motor no longer directly comparable to another motor not altered in such ways.
Since the advent of higher-efficiency designs, numerous papers and articles have drawn attention to the repair or replace issue. However, any representative sampling of that literature shows that the repaired versus new motor comparison was made only on the differences in motor performance (particularly the operating energy costs), the cost of repairs to a failed unit, and the cost of a new motor. No concern was expressed, by either manufacturers or the service industry, about relative life expectancy of the new versus repaired unit.
It’s true that those parts of a motor not replaced during repair will remain just as old as they were when the motor went into the shop. Except in the most severe applications, or a truly catastrophic failure (which is likely to preclude any conventional repair), that need not be a consideration in the repair-or-replace decision. Some of the shaft’s fatigue life will have been used up. Rewinding a stator doesn’t endow a castaluminum rotor cage with new life. The laminations will have aged. However, for standard integral horsepower motors, those components rarely succumb to old age.
Based on all that, the following conclusions seem reasonable:
* Depending upon the nature of the repair process, a repaired motor should not necessarily be any less “reliable” than a new one, regardless of the latter’s design. A complete new stator winding, and new bearings, should be no more subject to infant mortality than in a unit fresh from the factory.
* For those failures resulting from some inherent weakness in the machine, a proper repair can eliminate the problem.
* Apples should be compared to apples. Comparing a new “Premium Efficient” machine with a “repaired” EPACT (or pre-EPACT) motor is not a valid match-up.
* If a motor of EPACT (or earlier) design has failed, the cost to remove and either repair or replace it is a given. Three options confront the user: repair it, whatever the design; replace it with an EPACT-compliant unit; or replace it with a “Premium Efficient” unit. The choice should be made based on history, the nature of the application, the prices (of removal and re-installation as well as repairs or a new motor), and the energy costs-based on actual load and actual usage, not the 8,700 hours-per-year hype of the marketplace.
By Richard L. Nailen, P.E., EA Engineering Editor
Related Articles
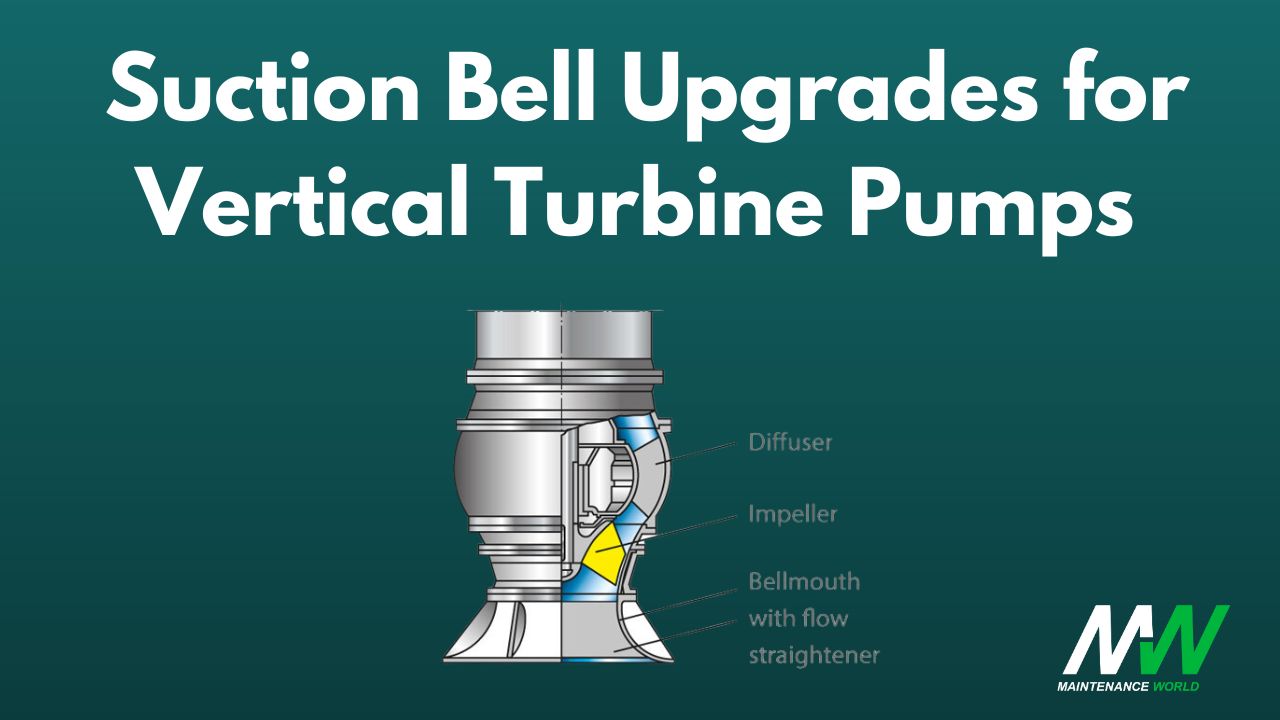
Suction Bell Upgrades for Vertical Turbine Pumps
How to Extend Bearing Life

Eliminate Belt Drive Problems

A Guide to Matching Electric Motors with Hydraulic Power Units
Developing an Effective Electric Motor Testing Program